シミュレータによる自動車運転
開発年
1972年
開発の経緯とねらい
本学習システムは、1970年科学技術庁の特別研究促進調整費による研究であるところの、「環境の高速度変化に即応する反射行動の形成プロセスの解明およびその教育方式の確立」の成果として生まれたものであり、自動車運転教習にシミュレータが使われるようになったそのきっかけになったものである。
行動分析の結果、運転行動を、
要素行動→要素行動の連関,連続行動→それらの複合行動としての操縦行動→
操縦行動を展開する場(空間)に対する測定行動→以上のものの組み合わせとしての運転行動
としてとらえ、それらを、「行動は行動することを通じて、その行動の神経回路が形成される」という当センターの行動形成に対する基本的な考え方を土台に、カリキュラムを組み立てた。
自動車運転教習における学習対象の中心は、実車とよばれる“自動車”である。しかし、この“自動車”は要素行動の総合としての完成された運転行動の対象となるものであるがゆえに、運転行動の要素となる行動やその連関,また連続行動といったものの学習にはきわめて不適切なものなのである。
従って本学習システムでは、多くの要素行動を一つひとつ確実に身につけ、連関→連続行動→複合行動→ という行動形成のプロセスを成立させるために、運転教習の前段階(場内教習の部分)をシミュレータを中心に構成したのである。
学習ユニットと学習時間
| ユニット | 学習時間 |
| 1. 運転姿勢のとり方 | 15分 |
| 2. 運転装置に対する基本姿勢 | 60分 |
| 3. 操縦訓練-速度の出し方 | 60分 |
| 4. 操縦訓練-制動動作(ブレーキ操作) | 20分 |
| 5. 操縦訓練-発進・停止・変動操作 | |
| 6. 直進運転訓練 | 80分 |
| 7. 操縦訓練-ハンドル操縦による方向のとり方 | 40分 |
| 8. 複合運転訓練-方向変換 | 60分 |
| 9. 複合運転訓練-前走車に対する車間距離 | 40分 |
| 10. 複合運転訓練-対向車の位置のとらえ方 | 10分 |
| 11. 複合運転訓練-複合運転訓練 | 20分 |
| 12. 複合運転訓練-道路の形態に応ずる運転 | 20分 |
| 13. 複合運転訓練-後走車に対する警戒運転 | 15分 |
| 14. 複合運転訓練-人・障害物 | 30分 |
| 15. 複合運転訓練-意図に応じる状況の判断 | 10分 |
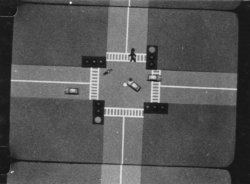
| 16. 交差点での運転 | 80分 |
| 計 | 560分 |
学習行動の対象となるシミュレータ
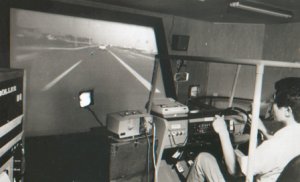
●運転装置,運転席および正面スクリーン
運転装置の形状と特性は、実車と同じ。学習行動の指示用テープレコーダや映写指示装置を備えている。映写装置は可変速機能をもち、アクセルやブレーキ装置と連動して走行場面を映し出す。



●模型車とサーキット
前走車に対して車間距離をとって運転する行動を身につけるためのもの。前走するプログラムカーの動きに応じて、学習者はアクセル,ブレーキを操作して後走車を追随させる。
●円盤装置
運転者のハンドル操作によって円盤が移動。方向変更に必要な操作をとらえる。

スクリーン上には交差点場面の状況が提示される。スクリーン下には、運転者の操縦に連動するプロジェクタがあり、交差点場面の映像と合成される。
ルームミラー,フェンダーミラー(右,左)に3台の8ミリプロジェクタを用いて同時に背景を映写する。

*なお、本システムの各種シミュレータおよびコントローラは、耐用年数が過ぎメンテナンス不可能となったために廃棄処分とし、現存しない。
学習実験の結果
実験の結果は、学習に要する時間は約9時間であった。さらに実車を使っての6~7時間のトレーニングを積んだ後、実車の検定(試験場におけるもの)に合格する段階に到達した。’72年当時実車による教習時間は平均30時間あまりであったので、15~16時間と約半分に短縮することが可能というデータを得ることができた。